W piątek 15 marca 2024 r. ogłoszone zostały wyniki kolejnej edycji konkursu na Projekty Studenckie FutureLab PK. Jest to już piąta edycja konkursu, która z roku na rok zrzesza coraz większą liczbę studentów Politechniki Krakowskiej. Do obecnej edycji zgłosiło się aż 57 projektów, z czego wybranych do realizacji zostało 27 – w tym 5 projektów z Wydziału Mechanicznego PK.
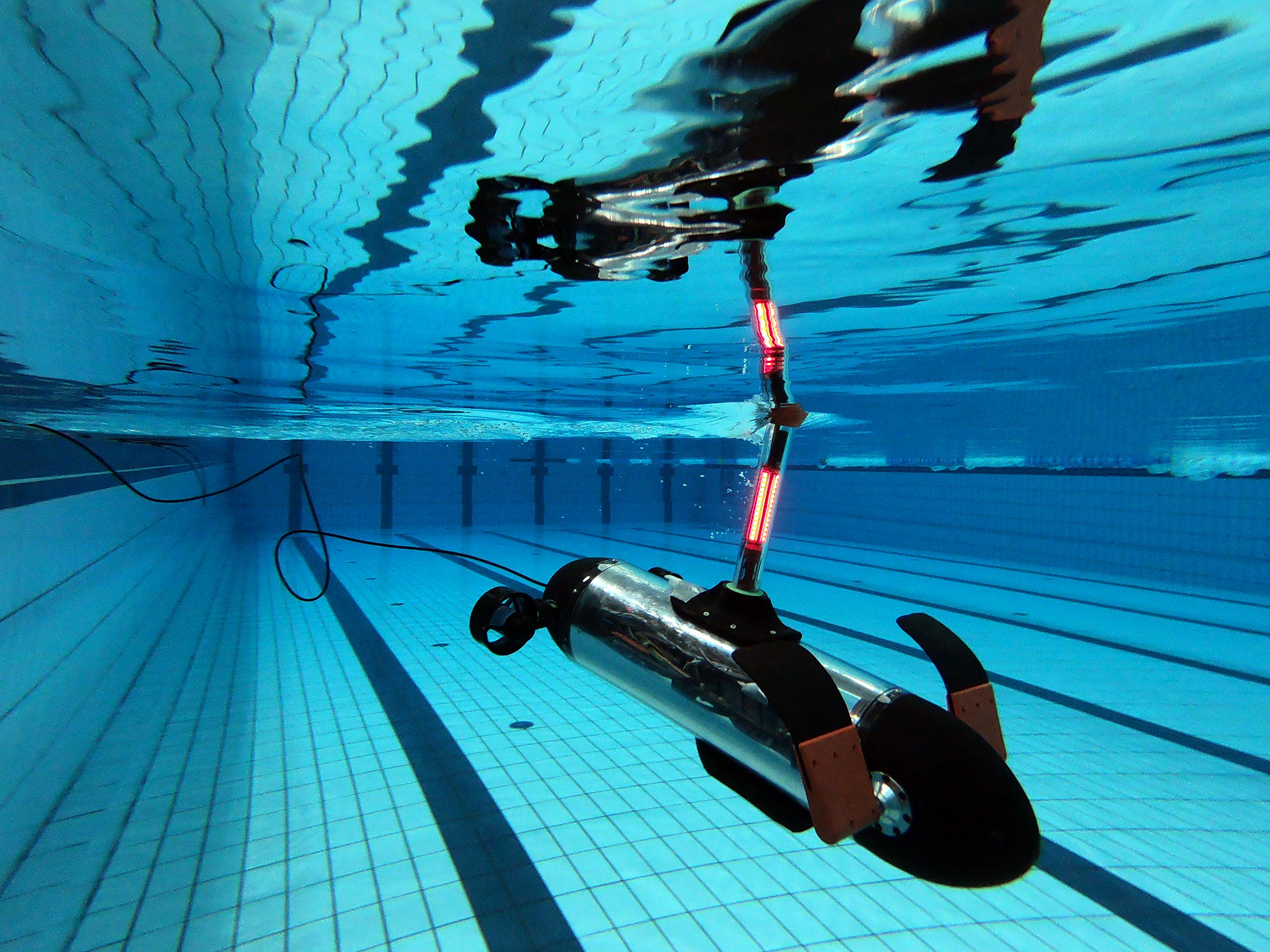
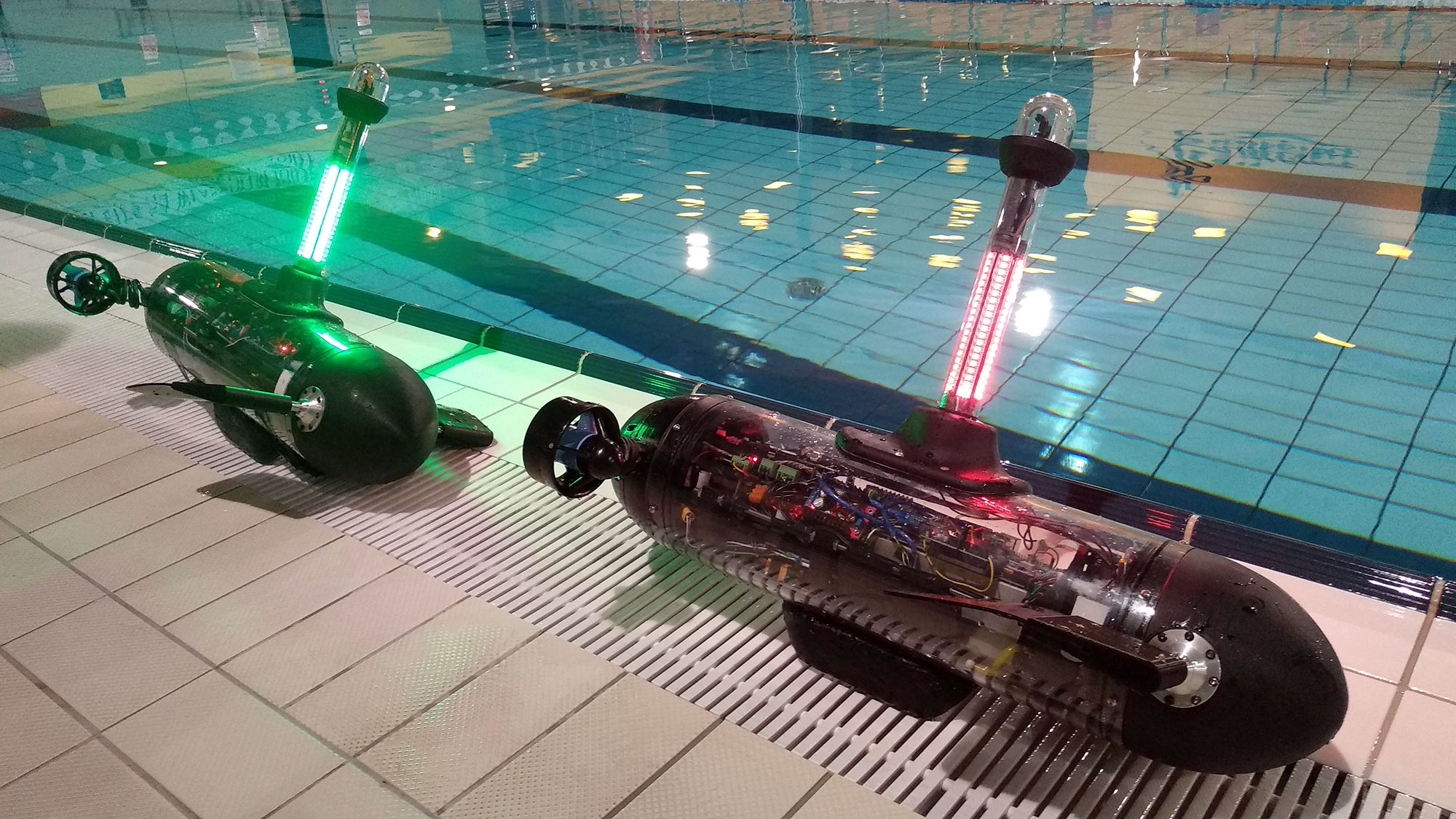
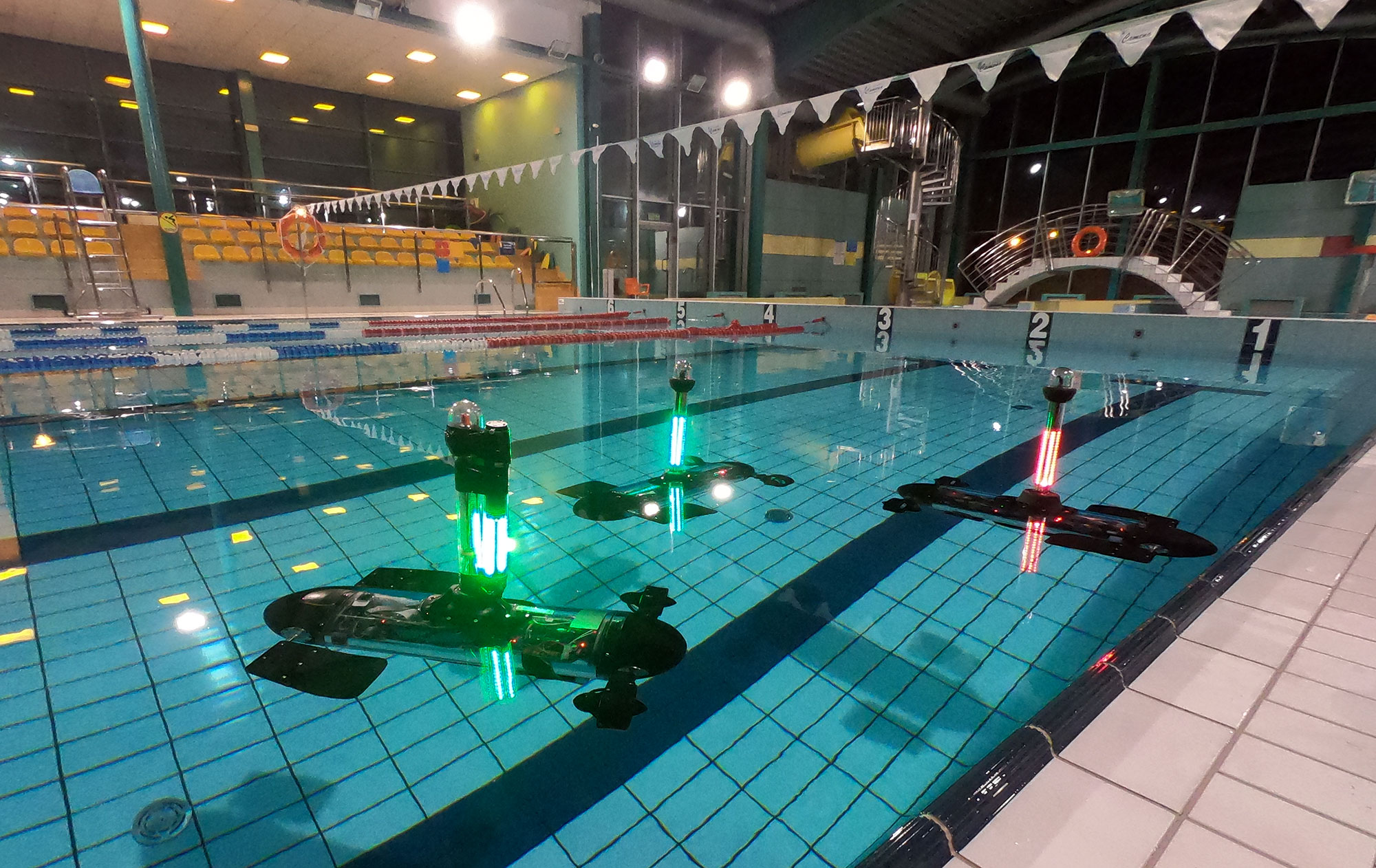
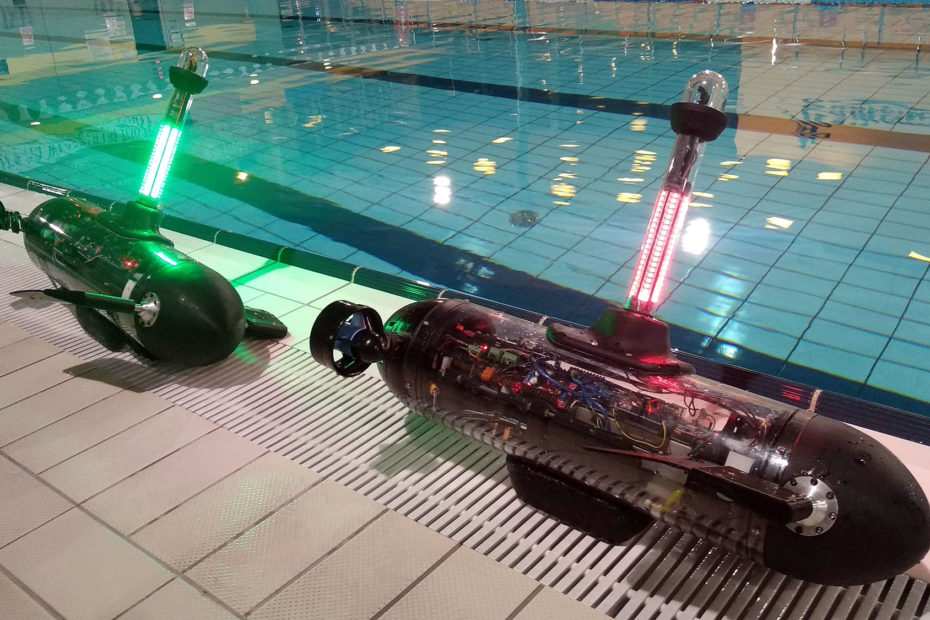
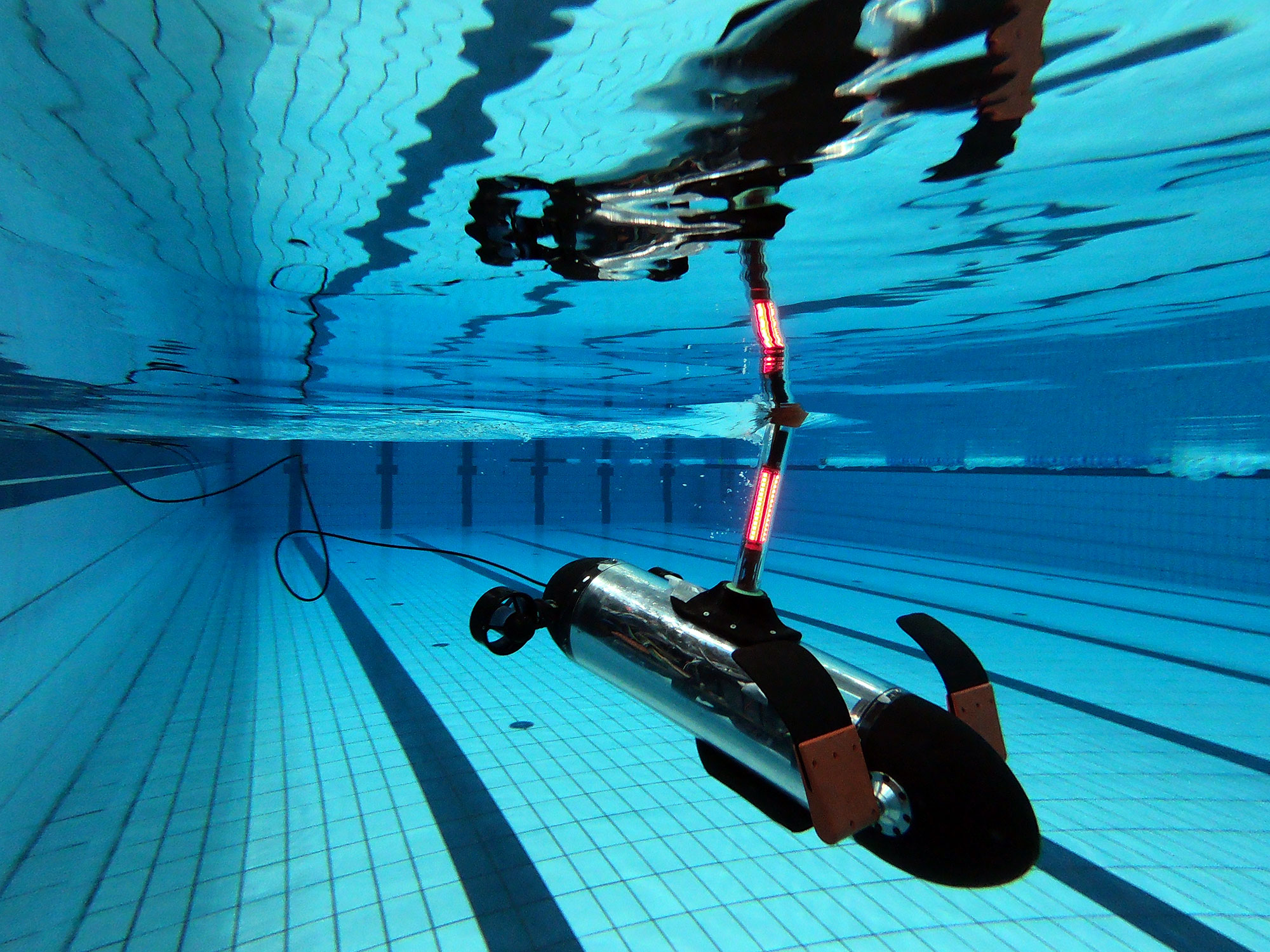
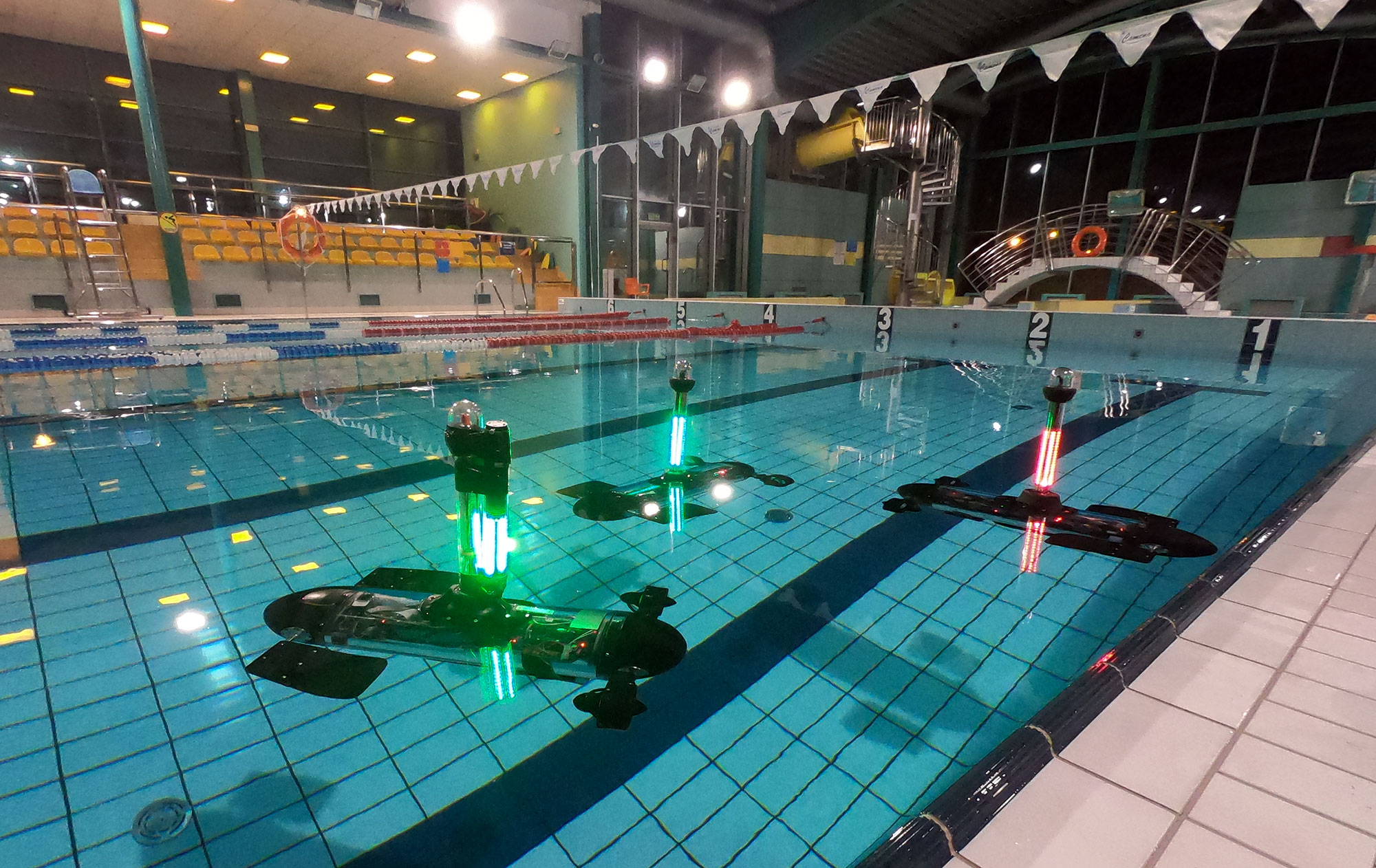
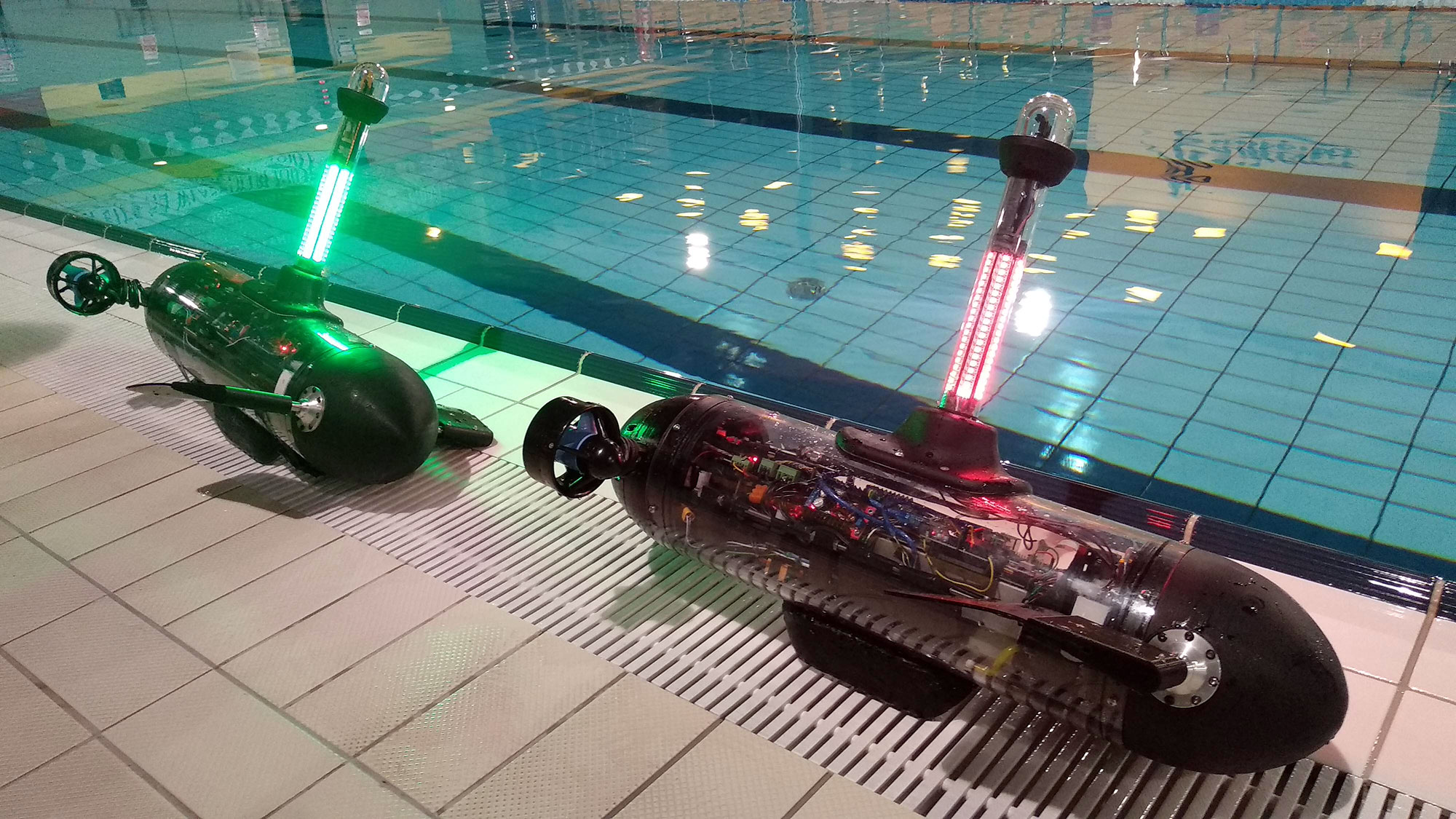
Jednym z tych nich jest projekt o nazwie: „Rozwój konstrukcji modułu manipulatora i systemu transportowego pojazdu latającego dla podwodnego robota pływającego o napędzie hybrydowym” autorstwa zespołu CyberRyby, wykonywany w ramach sekcji Robotów Podwodnych Koła Naukowego Automatyki i Robotyki. Jest on kontynuacją prac w Laboratorium Podwodnych Robotów Mobilnych Katedry Inżynierii i Automatyzacji Produkcji. Opiekę nad projektem sprawuje mgr inż. Tomasz Talarczyk, pracownik i doktorant w katedrze M-06, który brał udział we wcześniejszych edycjach konkursu FutureLab PK realizowanych pod opieką dr inż. Marcina Malca i dr inż. Marcina Morawskiego. W ramach tych projektów powstała m.in. Ławica Hybrydowych Pojazdów Podwodnych, będąca bazą dla obecnego projektu.
Ławica Pojazdów ma być elementem systemu monitorowania linii brzegowej akwenów i obszarów portowych. Wyposażenie jednego z pojazdów pracujących w ławicy w moduł manipulatora znacznie rozszerzy możliwości operacyjne całego systemu. Pojazd wyposażony w moduł manipulatora w przypadku misji poszukiwawczych umożliwi identyfikację, uchwycenie i transport przedmiotów z dna na powierzchnię. W przypadku zadań specjalnych urządzenie pozwoli np. przeszukiwać dno zbiornika wodnego, w celu identyfikacji niebezpiecznych mikro ładunków oraz przenoszenie ich poza obszar zagrożony. Moduł przenoszenia bezzałogowego aparatu latającego poprzez pojazd podwodny bazuje na rozwiązaniu odłączanego od pojazdu podwodnego szczelnego zasobnika o dodatniej pływalności, zawierającego semiautonomiczny quadrokopter wyposażony w kamerę o obiektywie szerokokątnym, którego zadaniem jest obserwacja z powietrza strefy działania pojazdów. Opracowane moduły będą mogły być dołączone do dowolnego pojazdu w ławicy. Dzięki temu powstanie system heterogenicznych maszyn zdolny realizować wielorakie zadania z obszaru prac podwodnych.
Cele Projektu:
- Budowa modułu semiautonomicznego manipulatora wykorzystującego metody analizy obrazu na potrzeby podwodnego pojazdu hybrydowego.
2. Podniesienie poziomu technologicznego systemu zwiększającego zakres operacyjny pojazdu podwodnego o możliwość realizacji rekonesansu linii przybrzeżnej z powietrza za pomocą przenoszonego miniaturowego aparatu latającego.
FutureLab